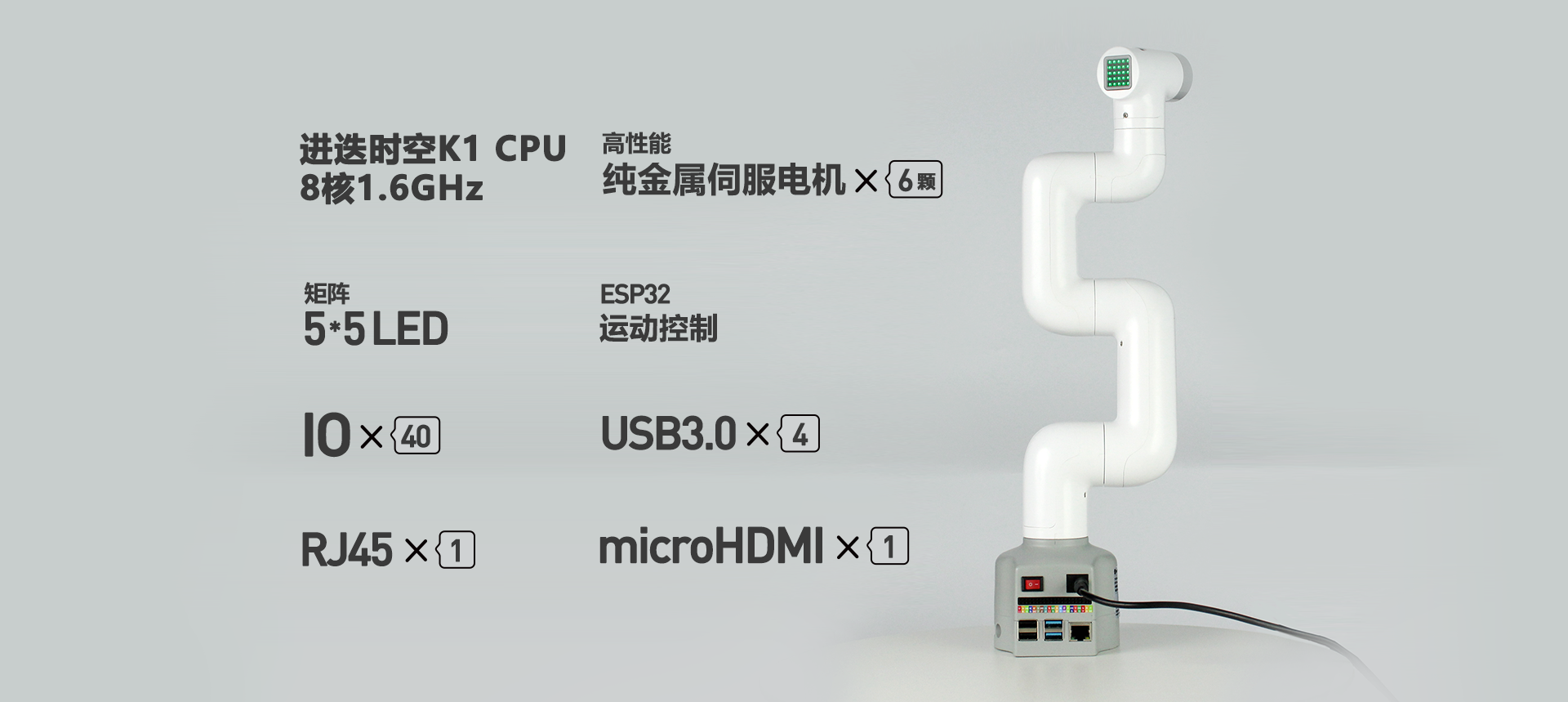
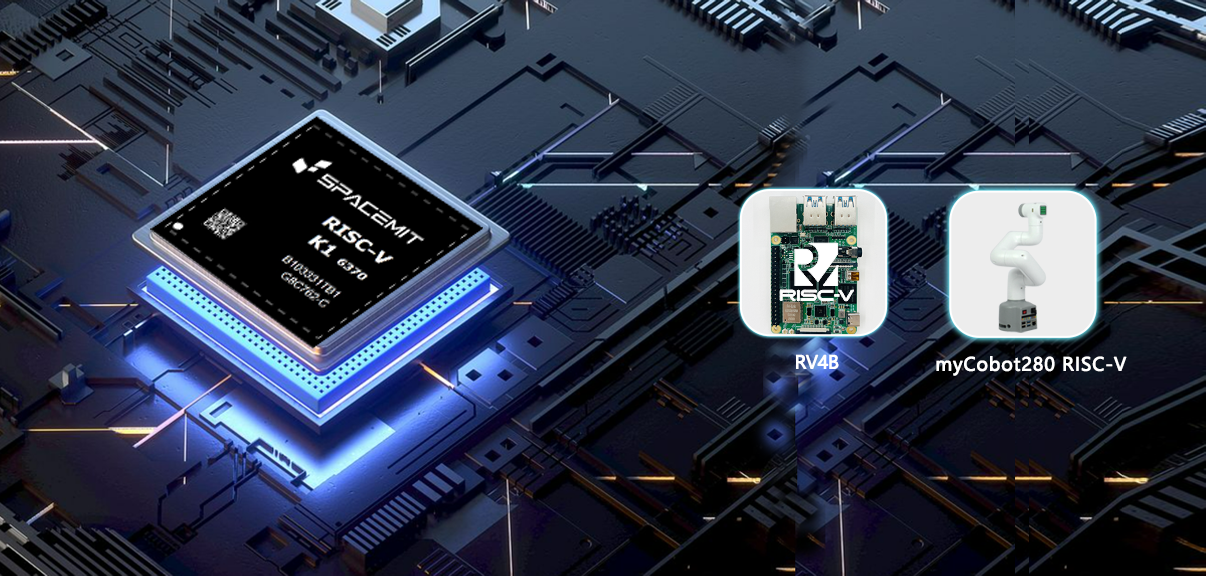
myCobot280 RISC-V 技術(shù)參數(shù) 使用手冊(cè) 前往淘寶 產(chǎn)品功能與應(yīng)用 ER myCobot 280 RISC-V內(nèi)置Bianbu OS 操作系統(tǒng),搭載進(jìn)迭時(shí)空最新的RISC-V AI處理器K1,以CPU融合AI的方式提供通用、易用的AI算力,遵循CPU的方式部署本地AI模型,可快速接入各類主流大模型算法。 AI 算力開源賦能 平臺(tái)從指令集、芯片軟硬件、操作系統(tǒng)、機(jī)器人控制、案例應(yīng)用等全棧技術(shù)開源,支持全平臺(tái)、全算法的二次開發(fā),有效加速各類大模型算法在機(jī)器人應(yīng)用的探索和落地。 平臺(tái)提供 2 TOPS AI 算力,以并行計(jì)算的 AI-CPU 核提供原生 AI 算力,實(shí)現(xiàn)與所有主流AI 生態(tài)的快速對(duì)接,本地大模型算力 > 10 Tokens/S @1B。 開發(fā)軟件生態(tài)豐富 Bianbu Linux SDK支持:包含OpenSBI、U-Boot、Linux內(nèi)核、根文件系統(tǒng)及示例代碼。 ?主流操作系統(tǒng)支持:適配Bianbu OS(基于Ubuntu優(yōu)化)、OpenHarmony、OpenWRT等。 ?AI組件:集成硬件加速的ONNX Runtime框架,支持用戶深度學(xué)習(xí)推理。 專業(yè)教育賽事支持 以CPU融合AI方式提供AI算力,快速部署各類模型。提供各類CNN、Transfarmer等開源算法案例,探索更多人工智能場(chǎng)景可能。提供全國(guó)大學(xué)生嵌入式芯片與系統(tǒng)設(shè)計(jì)競(jìng)賽及藍(lán)橋杯全國(guó)軟件和信息技術(shù)專業(yè)人才大賽比賽賽具支撐。 產(chǎn)品參數(shù)與功能 工作半徑 280mm 負(fù)載 250g RISC-V融合AI教育生態(tài) 任意攝像頭 APP 控制 拖動(dòng)示教 手柄控制 AI大模型 ROS2仿真控制 MYBLOCKLY GPIO接口 HDMI接口 實(shí)踐式新科學(xué)課程 Python 硬核配置 硬核的產(chǎn)品配置,完成您的嵌入式開發(fā)需求,按鍵交互,屏幕顯示,蜂鳴器,IO接口,你的所思所想,皆可開發(fā)。 基于進(jìn)迭時(shí)空RV4B主板 采用同構(gòu)融合計(jì)算技術(shù),集成進(jìn)迭時(shí)空自研的 8 個(gè)高性能 計(jì)算核 X60,可提供 50KDMIPS 通用算力,同時(shí)融合 2 TOPS AI 算力,可流暢運(yùn)行 0.5B、1B 的本地大模型。 主要應(yīng)用在 AI 邊緣計(jì)算機(jī)、AI+硬件、智能機(jī)器人、工業(yè) 主控、開源鴻蒙應(yīng)用等領(lǐng)域。 代碼模塊全開源 提供離線AI推理及控制新套件,并提供全流程模塊源代碼,官方 apt 倉(cāng)庫(kù)提供豐富的大模型資源,包括 deepseek-r1-distill-qwen-1.5b,Qwen2.5-0.5B 以及 Qwen2.5-1.5B等,同時(shí)還提供文本轉(zhuǎn)語(yǔ)音模型(melotts)與語(yǔ)音轉(zhuǎn)文本模型(paraformer)和視覺(jué)模型( yoloV8、 bytetrack、lightrack等)。倉(cāng)庫(kù)將持續(xù)更新,以支持最前沿的模型應(yīng)用,滿足各種復(fù)雜 AI 任務(wù)。 機(jī)器人編程輕松入門 提供專用于入門級(jí)教學(xué)的圖像拖拽式編程軟件 myBlockly ,拼圖式編程、圖形化調(diào)試?具,讓新手也能輕松駕馭機(jī)械臂; Python 2/3 開發(fā)環(huán)境,支持OpenCV、QT、pymycobot等多種開發(fā)驅(qū)動(dòng)庫(kù),機(jī)器人控制、圖像識(shí)別、前端開發(fā)滿足用戶的進(jìn)階開發(fā)需求; myBlockly Python ROS仿真控制支持 內(nèi)置ROS2 開發(fā)環(huán)境,支持RVIZ、MOVEIT演示案例,滿足用戶的深度開發(fā)需求。 myAGV + myCobot280 RISC-V 移動(dòng)底盤+機(jī)械手臂 搭配開發(fā),低成本開始機(jī)器人協(xié)作、SLAM建圖、自主導(dǎo)航、ROS開發(fā)環(huán)境、六軸協(xié)作機(jī)器人控制、視覺(jué)識(shí)別、設(shè)備間通信等多種開發(fā)內(nèi)容。 LLM大模型智慧零售應(yīng)用?? myCobot 280 RISC-V系統(tǒng)通過(guò)YOLOv8多模態(tài)感知引擎,實(shí)現(xiàn)商品視覺(jué)特征提取與語(yǔ)義理解的雙重訓(xùn)練,結(jié)合ASR語(yǔ)音識(shí)別與LLM自然語(yǔ)言處理能力,構(gòu)建端到端交互閉環(huán)。系統(tǒng)支持商品動(dòng)態(tài)選購(gòu),并通過(guò)多模態(tài)指令(語(yǔ)音+視覺(jué))驅(qū)動(dòng)機(jī)械臂完成抓取、分揀及定點(diǎn)投放任務(wù)。基于邊緣端算力部署與LLM動(dòng)態(tài)推理能力,打造"商品導(dǎo)購(gòu)-智能結(jié)算-掃描支付"全鏈路自動(dòng)化零售系統(tǒng),提升人機(jī)協(xié)作效率與用戶體驗(yàn)。 超多配件,隨心搭配 自適應(yīng)夾爪、攝像頭法蘭、吸泵等數(shù)十種配件,幫助你盡情發(fā)揮myCobot的創(chuàng)意想法 前往購(gòu)買 自適應(yīng)夾爪 平行夾爪 張角式夾爪 靈巧手 垂直吸泵 雙頭吸泵 筆夾持器 手機(jī)夾持器 攝像頭模組 春筍法蘭 G型底座 平面底座 myCobot280 RISC-V? 立即購(gòu)買 官網(wǎng)所有商品價(jià)格僅供參考,實(shí)際價(jià)格以結(jié)算為準(zhǔn)。





示教.png)










夾爪.png)





夾持器-1.png)